
|
AEROSPACE/MARINE |
|
Clouser Engineering P.O Box 986 El Dorado, CA 95623 Phone: 805-570-1606 Fax: 425-790-2842 E-mail: clouserengineering@gmail.com
|



|
Aerospace:
Research and Development for Astro Aerospace, subdivision of Northrop Grumman.
Developed Large Scale Satellite Reflectors (6-100 meters)
Developed Space Actuator Mechanisms
Reduced Stowage Volume of Astro Aerospace’s State-of-the-Art Deployable Reflector to 25% of Original Size. |
|
Extremely large and complex 3D-CAD models, thousands of parts, hundreds of degrees of freedom. Provided vital materials for proposals and presentations. |

|
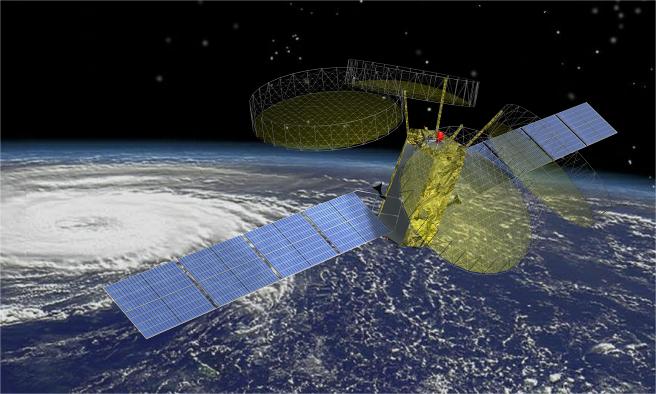
Stowed truss volume is extremely critical to be able to fit the hardware into a spacecraft faring.
The picture on the left is the original reflector stowed volume. The picture below on the right is after the product was redesigned.
The original, as impressive as it is, requires 4 times more space in the spacecraft faring.
The picture below the two stowed trusses is the size of both of these trusses deployed: 12 meters. It is in orbit on the MBSAT mission. |


|
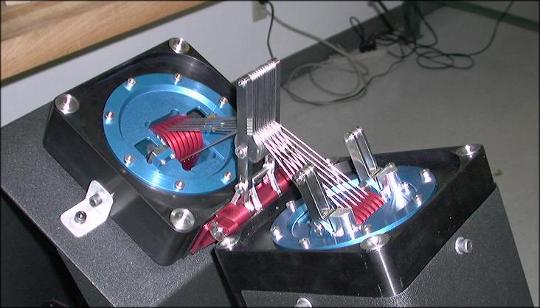
High Force Deployment Hinges |
|
High Force Deployment Spooler. This device travels linearly along the cylindrical axis to spool the cable without stacking or binding. It is driven by a stepper motor. |
|
Stowed |
|
Deployed |
|
Marine:
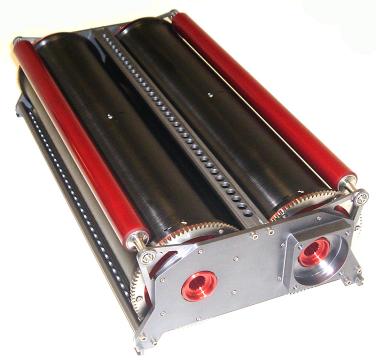
Clouser Engineering has developed many marine projects. The product shown below may be the best example. It is called CablePro for Western Space and Marine in Santa Barbara CA. This product was designed and built in only four months.
The product is a drive engine for offshore cable laying. It must provide a controllable tension and withstand thousands of miles of cable laying without needing serious maintenance. It needed to be able to articulate over large “bodies” in the cables such as repeaters and splices.
The product exceeded all of the customers requirements. |










|
CablePro installed on the Maersk Forwarder |
|
CablePro easily handling a repeater. |
|
CablePro’s Hydraulic System |
|
ROV (Remote Operated Vehicle) Development
Conceptualization for a “trencher” to bury the cable on the sea bed.
Shark not included |
|
Extensive work with underwater manipulators. |
